








Интерполяция изображений посредством оптимизированных преобразований цвета
2) Методы статистической оптимизации. Как мы можем видеть из вышесказанного, основной метод использует разности R – G и B – G на 2-м и 4-м шагах. Этот выбор достаточно произволен, и мы можем рассмотреть другие комбинации цветов такие, что цветовые компоненты менее коррелированны. Преобразование цвета может быть выбрано таким, чтобы оптимально достичь желаемых свойств [14, 15]. Так как большая часть пикселей исходного изображения отсутствует, применять преобразование цвета в самом начале алгоритма сложно. Но после восстановления зелёного это становится вполне возможным. Поэтому на 2-м и 4-м шагах предлагается следующее обобщение:

(2)
для некоторых констант a1, a2, d1, d2. Заметим, что B не содержится в С2, а R не содержится в С3,
потому что R и B известны для совершенно разных позиций пикселей ПЗС-изображения. Мы рассмотрим несколько возможностей выбора коэффициентов a и d.
Минимальные дисперсии C2 и C3
Идея состоит в поиске а1, а2 и d1, d2, минимизирующих дисперсии С2 и С3 соответственно.
Очевидно, если дисперсия С2 становится равной нулю, то алгоритм не внесёт ошибки в вычисление красной компоненты. Аналогично для С3 и синей компоненты.
Для того чтобы исключить тривиальный случай с нулевыми коэффициентами, следует ввести ограничение, которое будет гарантировать равенство L1- или L2-норм коэффициентов нулю, т. е.

(3)
Формулы для дисперсий следующие:

Эти дисперсии минимизированы одним из ограничений (3). Здесь var() и cov() означают дисперсию и ковариацию соответственно. Нахождение коэффициентов а1 и а2 при ограничении по L1-норме сводится к подстановке известных значений в формулу
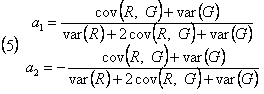
Формулы для d1 и d2 такие же, при этом R везде заменяется на B.
2.2 Минимальные ковариации С2 и С3
Нам нужно найти значения а1, а2 и d1, d2, минимизирующие ковариации С2 и С3, определённые выражением

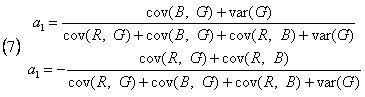
Можно наложить те же ограничения. При ограничении по L1-норме значения а1 и а2 вычисляются так:
Оправданность оптимизации похожа на ситуацию использования преобразований цвета в сжатии изображений: концентрация большей части энергии С2 и С3
в одном из преобразований снижает погрешность восстановления цвета.
Ортогонализация Грама-Шмидта
Идея декорреляции может быть рассмотрена как ортогонализация с помощью векторного произведения

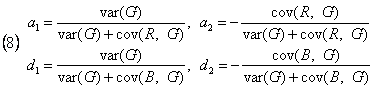
Для такой ортогонализации применим процесс Грама-Шмидта. Проблема заключается в том, что если мы начнём процесс со значений С2 и С3 для некоторых а1 и d1, не равных нулю, то в результате мы получим линейные комбинации, в которых присутствуют R и В. В качестве альтернативы рассмотрим отдельно ортогонализацию R, G и B, G. Начнём процесс с G и проекции R на G, аналогично для B и G. Возьмём эти 2 вектора в качестве С2 и С3, т. е. при ограничении по норме L1
Заметим, что при

нельзя ожидать, что
при выбранных коэффициентах, но С2 и С3 обычно становятся декоррелированными, т. к

Примечательно, что процесс Грама-Шмидта решает ещё две проблемы, о которых сказано ниже.
Минимизация ковариации

Рассмотрим упрощённый выбор

Получаем

Минимизируя (10), находим α и β:

Получаем фактически (8) с точностью до масштабирующего параметра.
Минимизация корреляции
Рассмотрим корреляцию

, определённую как
Выражение для Cov(C2, C3) дано в (10), а дисперсии определены как

Можно показать, что решение этой задачи такое же, как в (11).
Оптимальная гладкость С2 и С3.
Причина, по которой во многих алгоритмах используется разность R – G и B – G заключается в том, что разности – это по большей части низкочастотные сигналы [7].
Это значит, что разности гладкие или имеют небольшие градиенты в пространственной области. Более того, этот факт может быть использован для оценки значений отсутствующих пикселей
с использованием, например, билинейной интерполяции разностей [7, 8, 9]. Ниже предложены методы, позволяющие наложить гладкость на С2 и С3.