Все технологии, описанные ранее, может использовать почти каждый человек в домашних условиях. Конечно, огромный спектр машиностроительных технологий не ограничивается теми несколькими дисциплинами, о которых я постарался рассказать Вам. И если речь заходит о современных технологиях обработки материалов в промышленности, то наиболее популярным направлением будет являться промышленная робототехника. Стоимость даже самых простых таких роботов очень высока, но если Вам все же хочется научиться управлять таким устройством или даже конструировать нечто подобное, то в вологодском ЦМИТ Вы попробовать себя в этих направлениях.


Особенности работы
Как правило, под робототехникой подразумевается конструирование роботов. В нашем случае, сначала лучше разобраться с тем, как работает такое устройство. Несмотря на кажущуюся простоту, робот-манипулятор способен выполнять довольно много задач - от самых простых, вроде переноса предметов с места на место, до более сложных, включая, например, сварку металлических изделий по заданной траектории. Конечно, сварочные роботы не используются в учебных аудиториях ЦМИТ, однако принцип создания программ для сварки и для простого переноса предметов абсолютно идентичен. Говоря об особенностях работы, стоит выделить следующие пункты:
- Самое главное - техника безопасности. Оператор манипулятора, большую часть времени занят созданием программ для робота. При их запуске всегда стоит использовать специальный пошаговый режим тестирования, поскольку любая ошибка может привести к поломке оборудования и получению травмы.
- Физика процесса. По большому счету, функционал робота почти ничем не ограничен. Однако, все его действия будут связаны с перемещением инструмента. Помимо трёх стандартных координат пространства, роботу необходимо передавать еще три - углы поворота инструмента вокруг каждой из осей. Это позволяет достичь наибольшей гибкости при работе.
- Особый язык программирования. Программы для промышленных роботов создаются при помощи специального языка программирования, который чем-то напоминает язык ассемблера. Например, при написании программы доступно порядка 200 обычных регистров, которые могут хранить числа с плавающей точкой, и 100 позиционных регистров, представляющих собой шестиэлементные массивы, где каждая ячейка хранит соответствующее положение инструмента. Написание программ осуществляется при помощи специального пульта.
Технологии машинного зрения
В данный момент это один из наиболее интересных вопросов для освоения. Робот-манипулятор снабжен особой ячейкой, внутри которой установлена камера. При помощи специальных алгоритмов, можно научить его распознавать определенные формы. Подобные исследования очень интересны, а кроме того, им несложно найти реальное применение. В качестве примера работы таких технологий, робот был обучен распознаванию граней кубика, на которых нанесены от одной до шести точек. После обучения он способен определять, какое число выпало в результате броска. В нашем примере манипулятор на графическом планшете рисует соответствующее числу на грани количество треугольников.
Создание аналогов
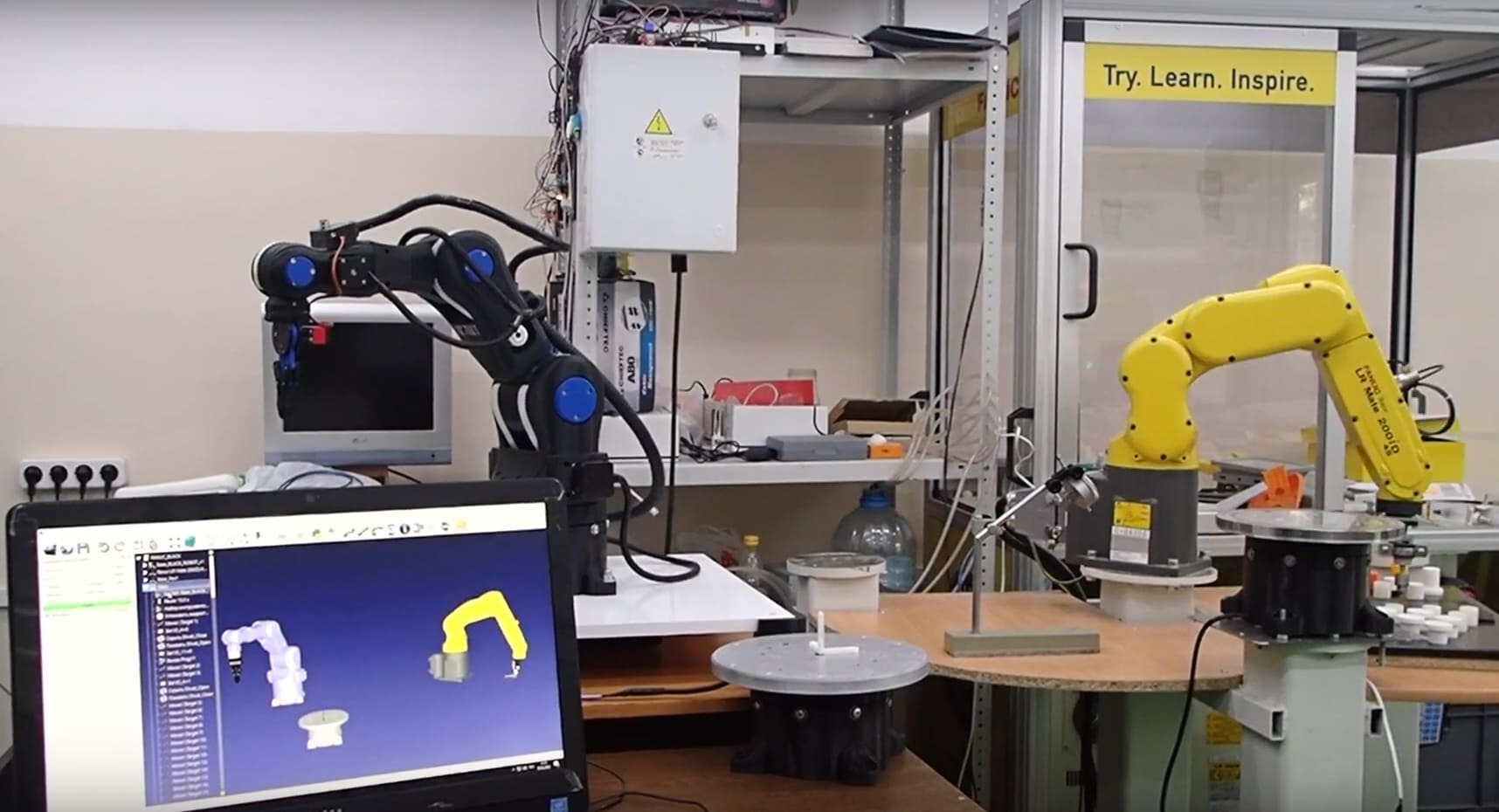
Работа на настоящем промышленном роботе - очень увлекательное занятие. Не менее увлекательным является проектирование и создание новых роботов с похожим функционалом. В настоящее время в ЦМИТ активно ведутся работы по изготовлению аналогичных устройств, которые могут быть удобнее в обращении и дешевле в производстве. Кроме того, подобные исследования позволяют хорошо изучить техническую и программную составляющие промышленного робота и способы внешнего взаимодействия с ним. Создано уже несколько функционирующих прототипов, однако до полного решения задачи еще далеко, поэтому у всех, кто желает всерьез заниматься робототехникой есть прекрасная возможность поучаствовать в довольно серьезной разработке и существенно повысить свои умения в этой области.
Итак, подводя итоги, можно сказать, что изучение промышленной робототехники ничуть не менее интересно, чем изучение обычного конструирования роботов. Конечно, для достижения успеха при решении задач конструирования аналогов заводских роботов и использования технологий машинного зрения требуется уже немало знаний в соответствующих областях, но для тех, кто уже имеет определенный опыт такая практика будет гораздо интереснее и перспективнее сборки примитивных устройств.